Ruch¶
BBC micro:bit ma wbudowany akcelerometr. Mierzy on ruch wzdłuż trzech osi:
*X - przechylanie od lewej do prawej. *Y - przechylanie do przodu i do tyłu. *Z - poruszanie górę i w dół.
Dla każdej z osi jest metoda zwracająca liczbę dodatnią lub ujemną, wskazując pomiar w mili-g. Kiedy wyświetlacz pokazuje 0, oznacza to, że przyrząd jest równoległy do danej osi.
Poniższy przykład pokazuje bardzo prostą poziomicę wykorzystującą metodę get_x mierzącą jak bardzo urządzenie jest wypoziomowane względem osi X.
from microbit import *
- while True:
reading = accelerometer.get_x() if reading > 20:
display.show(„R”)
- elif reading < -20:
- display.show(„L”)
- else:
- display.show(„-„)
Jeżeli trzymasz urządzenie płasko, powinno ono wyświetlić -; jednak jeżeli tylko obrócisz je w lewo lub w prawo, pokaże ono odpowiednio L lub R.
Chcemy, aby urządzenie natychmiastowo reagowało na zmiany, dlatego też użyliśmy nieskończonej pętli while. Pierwsza rzecz, która stanie się w ciele pętli, to pomiar wzdłuż osi X nazwany reading (pol. odczyt). Ponieważ akcelerometr jest bardzo czuły, urządzenie jest uznane za wypoziomowane kiedy wartości znajdują się w granicy +/-20. Dlatego właśnie warunki if oraz elif sprawdzają dla wartości >20 oraz <-20. Wyrażenie else oznacza, że jeżeli reading znajduje się pomiędzy -20 i 20, to urządzenie uważane jest za wypoziomowane. Dla każdego z tych warunków do pokazania odpowiednich znaków używamy wyświetlacza.
Istnieje również metoda get_y dla osi Y oraz get_z dla osi Z.
Zastanawiałeś się kiedyś w jaki sposób telefon komórkowy rozpoznaje w którą stronę jest zwrócony i w jaki sposób ma być zorientowany wyświetlany obraz na ekranie? Potrafi to właśnie dzięki wbudowanemu akcelerometrowi działającemu dokładnie jak ten w powyższym programie. Kontrolery gier również zawierają akcelerometry umożliwiające sterowanie i poruszanie się w grach.
Muzyczny Zamęt¶
Jednym z najcudowniejszych aspektów MicroPython na BBC micro:bit jest łatwość z jaką można łączyć różne możliwości tego urządzenia. Na przykład zamieńmy go (w pewnym sensie) w instrument muzyczny.
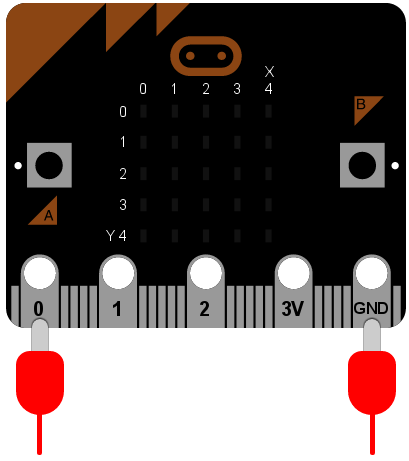
Podłącz głośnik zgodnie z instrukcją w rozdziale Muzyka. Użyj krokodylków. Połącz styki 0 oraz GND z dodatnim i ujemnym wejściem głośnika – nie ma znaczenia które wejście z którym stykiem zostanie połączone.
Co się stanie jak wykorzystamy odczyty z akcelerometru i stworzymy na ich podstawie dźwięki o danym tonie? Przekonajmy się:
from microbit import *
import music
while True:
music.pitch(accelerometer.get_y(), 10)
Kluczowa linijka znajduje się na końcu i jest niewiarygodnie prosta. Zagnieżdżamy odczyt z osi Y jako częstotliwość wprowadzaną do metody music.pitch. Ponieważ chcemy, żeby ton był zmieniany tak szybko jak urządzenie jest przechylane, pozwalamy mu grać tylko przez 10 milisekund. Dzięki temu, że urządzenie jest w niekończącej się pętli while, nieustannie reaguje na zmiany w odczytach osi Y.
To wystarczy!
Przechyl urządzenie do przodu i do tyłu. Jeżeli odczyt wzdłuż osi Y jest dodatni, zmieni wysokość dźwięku granego przez micro:bit.
Wyobraź sobie całą orkiestrę symfoniczną takich urządzeń. Możesz zagrać melodię? Jakie zmiany wprowadziłbyś do programu, aby micro:bit brzmiał bardziej muzykalnie?